





















Globalna konkurencja, rosnące płace oraz niedobory kadry technicznej sprawiają, że automatyzacja i robotyzacja procesów stała się nieodzownym elementem strategii przedsiębiorstw produkcyjnych. Zakłady funkcjonujące w branży motoryzacyjnej, lotniczej i elektromaszynowej wprowadzają najnowsze technologie wytwarzania i organizacji produkcji. Głównym celem tych działań jest podniesienie jakości oraz zapewnienie powtarzalności produkcji. Jednym ze sposobów usprawnienia ciągu technologicznego jest zastosowanie robotów przemysłowych, które są obecnie wykorzystywane m.in. w procesach spawania, odlewania, kontroli jakości czy też w obróbce skrawaniem.
W odpowiedzi na wyzwania technologiczne XXI wieku na Wydziale Mechaniczno-Technologicznym w Stalowej Woli zostało utworzone Laboratorium Robotyki, które ma być miejscem kształcenia kadr i doskonalenia technologii na potrzeby Przemysłu 4.0. Na jego stanie znajdują się w tej chwili cztery roboty wyposażone w oprzyrządowanie pozwalające na realizację działań z zakresu spawalnictwa, odlewnictwa, obróbki ubytkowej, paletyzacji i kontroli. Wśród robotów wchodzących w skład laboratorium znajduje się jeden duży robot przemysłowy z oprzyrządowaniem laserowym, dwa mniejsze roboty przemysłowe o charakterze dydaktycznym z oprzyrządowaniem odlewniczym i obróbczym oraz nowoczesny co-bot (robot przeznaczony do bezpośredniej współpracy z człowiekiem) z oprzyrządowaniem paletyzacyjnym. Pracownia posiada również nowoczesne stanowiska dydaktyczne do automatyki przemysłowej, które zostały zintegrowane z robotem współpracującym. Dodatkowym elementem wyposażenia laboratorium są stanowiska komputerowe służące do programowania i symulacji pracy robotów w trybie off-line. Całość daje możliwość kompleksowego zdobywania wiedzy nie tylko z zakresu programowania robotów, ale również rozwijania umiejętności praktycznych w dziedzinie konkretnych technologii. Z laboratorium intensywnie korzystają zarówno studenci studiów dziennych, jak i zaocznych. Szczególnie dużo bezpośredniego kontaktu z robotyką mają ci studenci studiów magisterskich, którzy wybrali specjalność Robotyzacja i organizacja procesów wytwarzania. Widząc ogromne zapotrzebowanie na specjalistów w zakresie programowania robotów, Wydział Mechaniczno-Technologiczny prowadzi od ponad dwóch lat dedykowane, roczne studia podyplomowe pod nazwą – Programowanie robotów przemysłowych. Aktualnie trwa nabór na kolejną edycję tych specjalistycznych studiów. Laboratorium stwarza też możliwość prowadzenia krótkich, dedykowanych szkoleń dla mniejszych grup, dla których program kształcenia ustalany jest indywidualnie.
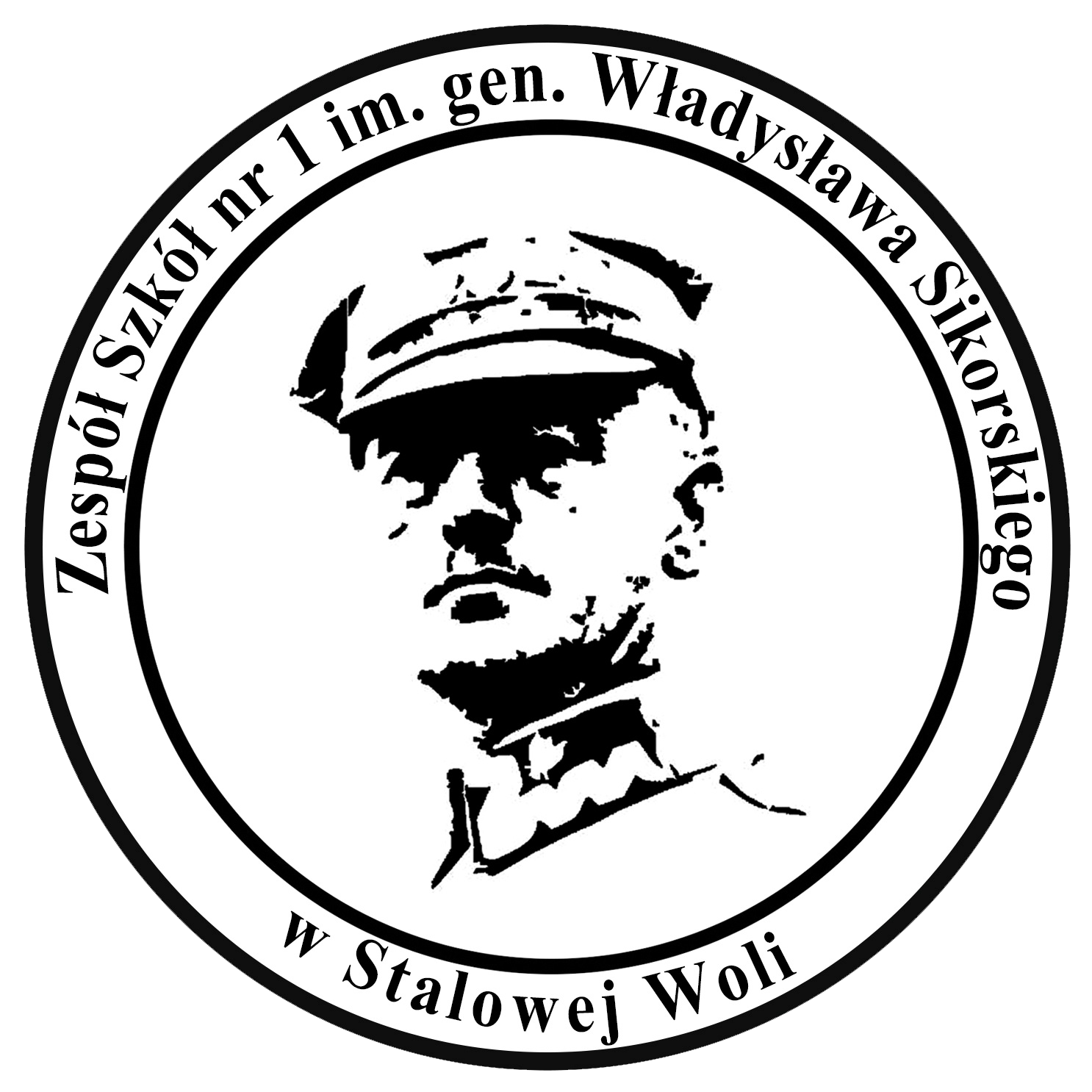
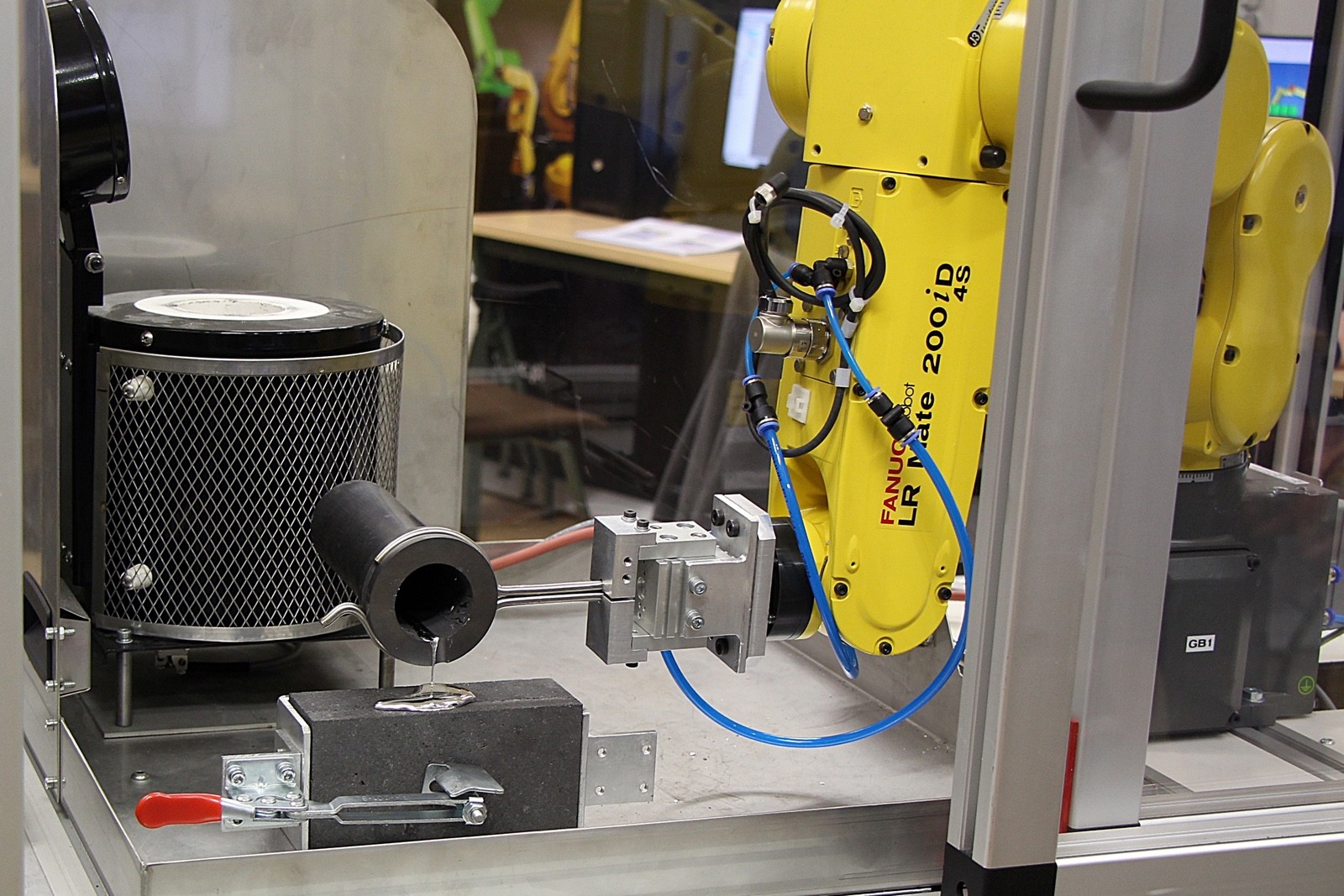
Jednym z robotów znajdujących się w nowym laboratorium WMT jest Fanuc LR Mate 200iD/4S, który może być wykorzystywany w procesach produkcyjnych z ograniczoną przestrzenią roboczą. Posiada predyspozycje do pracy w zwartych gniazdach zrobotyzowanych i na liniach produkcyjnych. Dzięki mniejszej masie, montaż robota na podłożu, stropie, ścianie maszyny (na zewnątrz lub wewnątrz), a nawet ,,do góry nogami” jest łatwiejszy i znacznie tańszy. Dodatkowo wyposażony został w różnego rodzaju funkcje inteligentne, m.in. czujniki wizyjne, czujniki siły oraz zestawy specjalnego zastosowania (chwytaki), umożliwiające chociażby realizację procesów odlewniczych. Znajduje zastosowanie m.in. w przemysłach obróbki skrawaniem, motoryzacyjnym, spożywczym, transportowym i elektronicznym.
Fanuc LR Mate 200iD/4S wykorzystywany jest w firmach najczęściej do usprawnienia operacji pobierania, odkładania lub pakowania produktów, a także obsługi innych maszyn. Integracja z maszynami standardowymi oraz specjalnego przeznaczenia pozwala zwiększać efektywność produkcji i optymalizować jej koszty. W ramach danej serii robotów dostępne są także kompaktowe roboty przeznaczone do pracy w pomieszczeniach „clean room” oraz środowisku o podwyższonym poziomie wilgoci. Są one doskonale przygotowane do obsługi wymagających procesów produkcji żywności.
W żółtej fabryce przyszłości FANUC, robot LR MATE 200iD prezentuje aplikację typu pick and place, gdzie z dużymi prędkościami umieszcza detale w przykładowych gniazdach produkcyjnych.
Interesującym przykładem jest stanowisko Roboshot, stanowiące połączenie nowoczesnego zespołu wtryskowego z zaawansowanym sterowaniem CNC, które może być uzupełnione robotem LR Mate 200iD.
Robot może obsługiwać również kilka centrów roboczych, co zostało wykorzystane w integracji centrum obróbczego Robodrill z robotem FANUC LR Mate 200iD.
Firma Flexlink wykorzystała LR Mate 200iD do przeprojektowania linii montażowej, w celu poprawy wydajności i osiągnięcia tempa produkcji na poziomie 60 sztuk na minutę. Zastosowano robota delta FANUC M-1iA wyposażonego w system wizyjny iRVision, który wizualnie sprawdza przedmioty trafiające losowo na przenośnik, pobiera odpowiednie i umieszcza je na taśmie przenoszącej. Następnie robot LR Mate 200iD odbiera przedmioty i umieszcza je w opakowaniach. System wizualizacji, w połączeniu z drugim robotem, przeprowadza kolejną kontrolę, by zapobiec nieprawidłowemu położeniu. Takie rozwiązanie umożliwiło uzyskanie kompaktowej, zoptymalizowanej linii produkcyjnej, osiągającej znakomite czasy cykli i nie wymagającej dodatkowych przenośników ani urządzeń.
Kolejny sukces zastosowania robotów FANUC LR Mate to użycie ich jako elementy pomagające produkować i dekorować popularne ciasta Solothurner Torte szwajcarskiej firmy Suteria. Dzięki zasięgowi i sprawności porównywalnym z ludzkim ramieniem, robot stał się prawdziwym skarbem dla piekarni. Rola, którą odgrywa jest niewielka, jednak powodem jego zastosowania jest „klasyczny” scenariusz. Dla człowieka to monotonne i nużące zadanie, zwłaszcza biorąc pod uwagę tysiące ciast produkowanych w ciągu roku.
Następnym przykładem jest Firma Roboplan, która na nowo zaprojektowała cały zakład, wykorzystując roboty FANUC LR Mate 200iD na końcu linii produkcyjnej. Okazały się idealnie przystosowane do wymagających zadań umieszczania w pudełkach puszek produkowanych przez firmę Hoffmann.
Natomiast w specjalistycznych zakładach obróbki tworzyw sztucznych szwajcarskiej firmy Wild & Küpfer AG wykorzystuje się zrobotyzowaną celę do montażu płytek PCB do silników. Linia składa się z trzech robotów LR MATE 200iD przenoszących tacki, pozycjonujących i orientujących komponenty oraz kontrolujących gotowe zestawy. Wykorzystując system FANUC iRVision, pierwszy robot wyjmuje elementy nośne silnika z pojemnika, a następnie umieszcza je w uchwycie na obrabiany przedmiot. Drugi umieszcza płytki drukowane silnika w elementach nośnych. Po zakończeniu nitowania na gorąco trzeci robot przeprowadza kontrolę gotowego zestawu i umieszcza go w pojemniku transportowym. To rozwiązanie pokazuje, w jaki sposób można połączyć standardowe elementy w celu stworzenia elastycznej zrobotyzowanej celi montażowej, co z kolei wpływa na skrócenie czasów cyklu, gdyż kontrole jakości i kompletności są wykonywane w ramach jednego procesu.
Stanowisko znajdujące się w Laboratorium Robotyki doposażono w unikatowy moduł do odlewania, który zaprojektowano na WMT. Dodatkowe dwa moduły technologiczne umożliwiają symulację przemieszczania palnika spawalniczego oraz obróbkę ścierną. Robot został zintegrowany z oprogramowaniem symulacyjnym FANUC ROBOGUIDE, co pozwala na projektowanie, planowanie aplikacji, wirtualne testowanie, zbieranie danych oraz optymalizację procesów produkcyjnych.
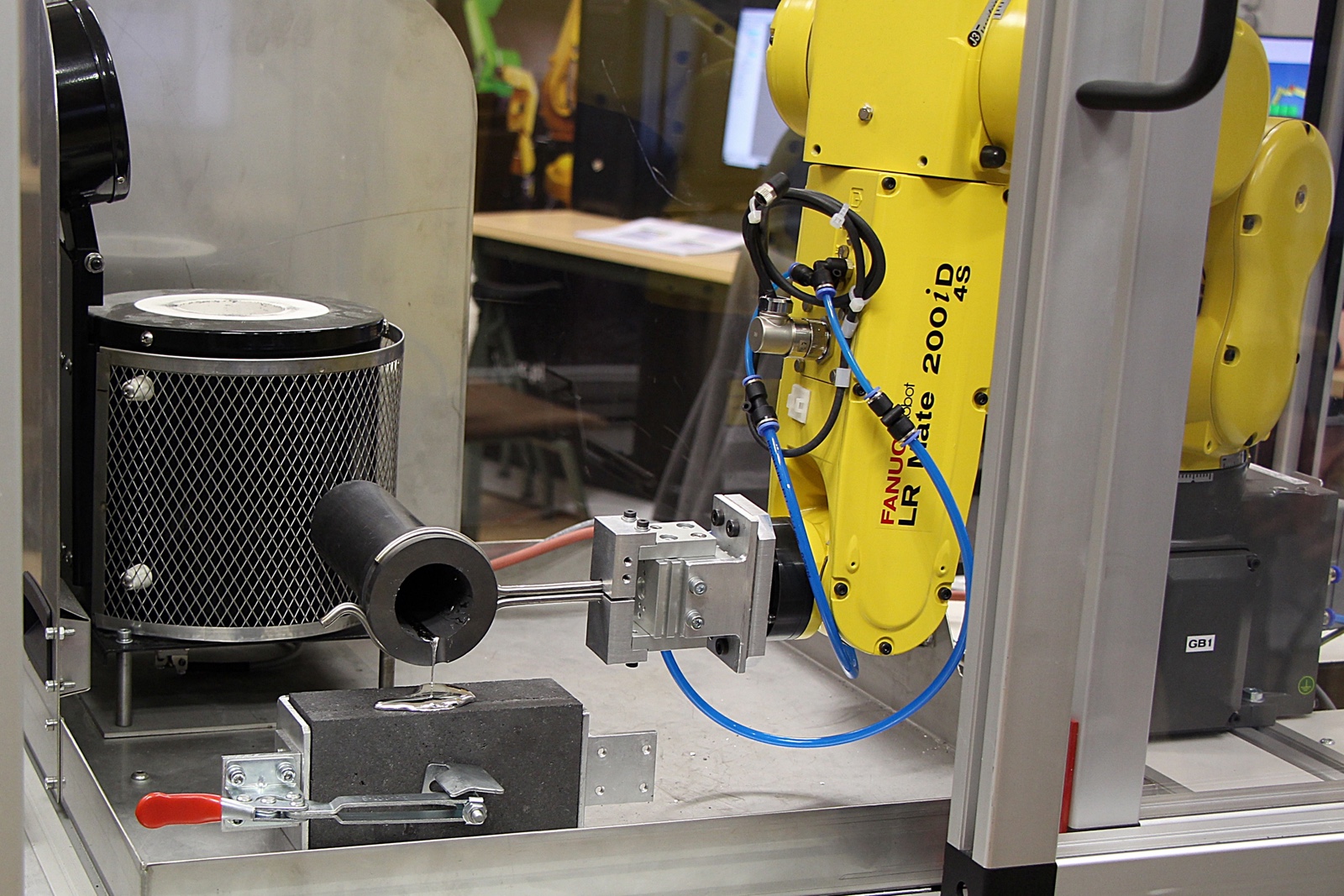

Rys. 1. Pracujący robot przemysłowy Fanuc LR Mate 200iD/4S, znajdujący się w laboratorium na WMT
Kolejny robot na WMT to Kuka KR 3 R540, należący do serii robotów KR AGILUS. Jest to urządzenie bardzo wszechstronne, wykazujące dużą precyzję pracy na małej przestrzeni roboczej. Znajduje szerokie zastosowanie w procesach produkcyjnych, m.in. do nakładania klejów, uszczelniaczy, lakierowania, spawania łukowego w atmosferze gazów ochronnych, pakowania, obsługi maszyn do odlewania ciśnieniowego metali, montażu małych elementów, przykręcania śrub czy kontroli jakości. Dużym plusem, podobnie jak w przypadku wcześniej opisanego robota firmy FANUC, jest różnorodność podłoża, na którym może być zamontowany, np. na podłodze, stropie oraz ścianie. Ze względu na szybkość wykonywania zadań znajduje zastosowanie także w miejscach, w których wymagane jest skrócenie czasu pracy i zwiększenie wydajności produkcji. Wszystkie zadania związane z planowaniem i projektowaniem, mogą być wykonywane w trybie off-line, za pomocą oprogramowania KUKA.Sim Pro 3.1 oraz przesłane za pośrednictwem połączenia sieciowego do układu sterowania, co zapewnia większą elastyczność i produktywność. Robot został wyposażony także w ręczny programator KUKA smartPAD.
Przykładem praktycznego zastosowania Przemysłu 4.0 z wykorzystaniem robota Kuka KR 3 R540 jest rozwiązanie przedstawione przez firmy Robomotion oraz Sotec. Zademonstrowały one zrobotyzowaną komórkę roboczą, która została zbudowana wokół robota Kuka KR Agilus. Pokazuje ona, jak może działać przepływ danych między robotami a chmurą. Istnieje możliwość sterowania robotem za pomocą smartfonów i śledzenia powiązanej komunikacji, która odbywa się za pośrednictwem monitora.
Roboty KR Agilus znalazły również zastosowanie w lakierniach Hannnex, które zaadaptowały je do lakierowania elementów, w celu zwiększenia szybkości i precyzji tego zabiegu.
Kolejnym miejscem, w którym również zdecydowano się na zakup robotów z serii Agilus jest firma WKT Kunststofftechnik GmbH, która od 1994 roku zajmuje się produkcją prętów gwintowanych, budową maszyn, izolacjami termicznymi i elektrycznymi. Jedną z czynności wstępnych procesu produkcyjnego, jest montaż trzech komponentów w celu uzyskania uniwersalnej śruby z tworzywa sztucznego. Duroplastycznych tworzyw sztucznych nie można zgrzewać, dlatego do łączenia elementów używany jest specjalny klej. Czynność ta wymaga maksymalnej precyzji. Tutaj wkraczają do akcji roboty KUKA. Na początku nakrętka jest chwytana i umieszczana w uchwycie. Drążek gwintowany jest następnie chwytany, podnoszony i obracany o 180 stopni w celu naniesienia kleju na spód elementu. Kolejna czynność to wkręcenie drążka gwintowanego w nakrętkę. W ten sposób z obu komponentów powstaje zmontowany element. W ramach ostatniej czynności dodawana jest podkładka. W tym celu robot chwyta podkładkę i umieszcza w taki sposób na drążku gwintowanym, aby zsunęła się na nakrętkę. Dzięki kamerom robot może samodzielnie kontrolować produkt. W ciągu kilku sekund istnieje możliwość sprawdzenia precyzji pracy i odróżnienia część wybrakowanej od prawidłowej. Gotowa śruba zostaje wyjęta i umieszczona w uchwycie do utwardzania.
Roboty KUKA Agilus wykorzystywane są również w celu uatrakcyjnienia, a przy okazji usprawnienia przygotowywania drinków w barze na tarasie hotelu TownHouse Duomo w Mediolanie. To właśnie tam kreatywne drinki miksuje barman-robot „Toni”. Dwa roboty KUKA typu KR 10 R1100-2 i KR 6 R900-2 są zamontowane na kontuarze. Pierwszy miksuje drinki i koktajle, a drugi jest wsparciem przy serwowaniu. Ponad nimi umieszczone są uchwyty na około 150 butelek, z których barman-robot nalewa składniki. Na tylnej ścianie modułu znajdują się dystrybutor lodu oraz nalewak do piwa, wina i wody gazowanej. Jest też zamontowany zlew, w którym robot wypłukuje shaker do koktajli po każdym zamówieniu. Goście wybierają drinki przy użyciu aplikacji, w której mogą również sami dobierać składniki. Gdy zamówienie jest gotowe, dostają powiadomienie.

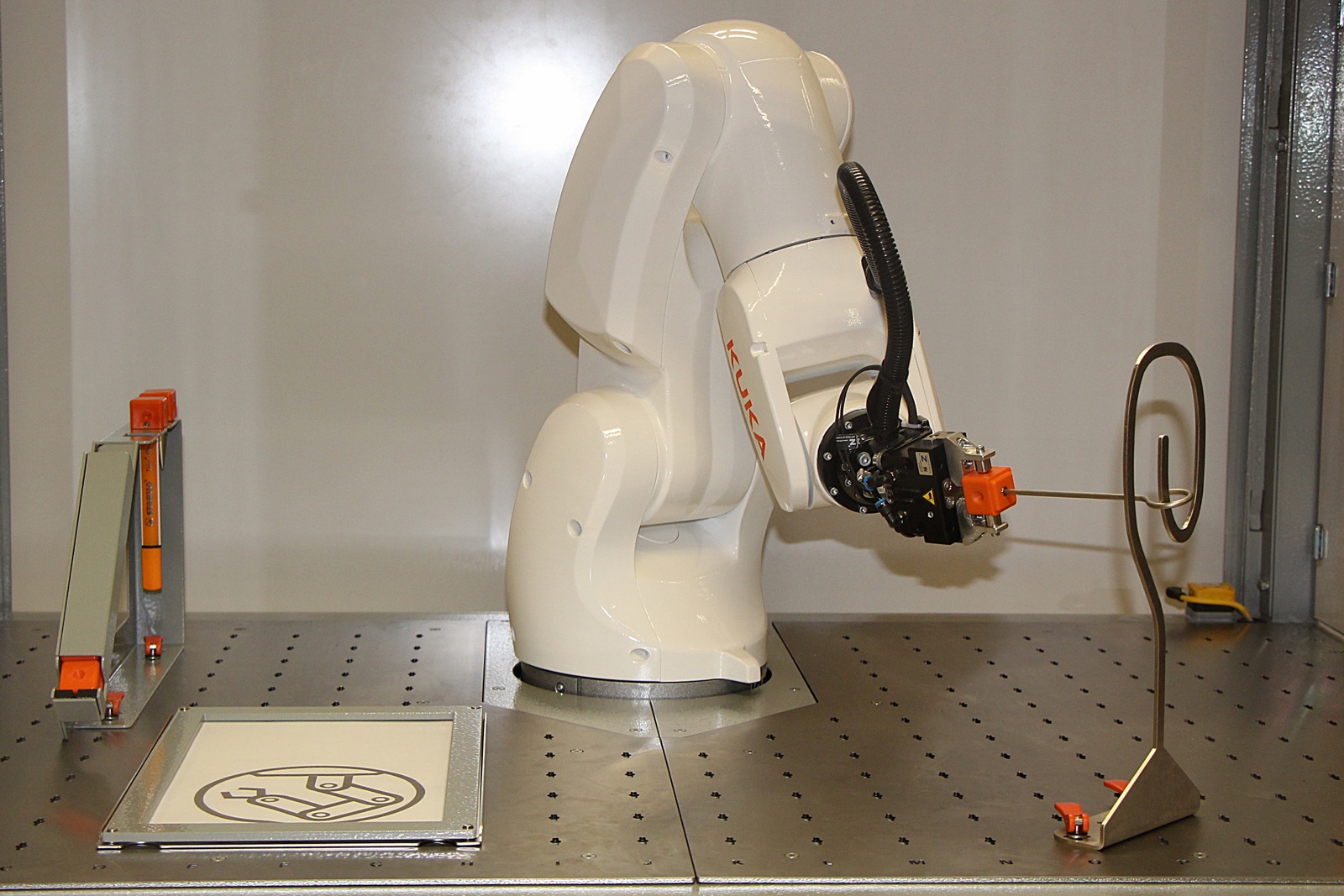
Rys. 2. Robot Kuka KR 3 R540
Trzecim robotem w laboratorium WMT jest robot współpracujący HCR-5, który może bezpiecznie pracować z człowiekiem, bez konieczności stosowania specjalistycznych barier ochronnych. Można go zainstalować obok operatora, ponieważ urządzenie zatrzymuje się, gdy wykryje kolizję zewnętrzną. Zapewnia łatwość programowania w oparciu o zasadę „uczenie przez pokazywanie” lub „rejestrowanie ścieżki, którą ma podążać”. Istnieje również możliwość podłączenia dowolnych urządzeń peryferyjnych, które pozwalają na obsługę maszyn, linii produkcyjnych, przenoszenie elementów, rozładunek i załadunek, realizację procesów montażu czy też kontroli jakości. Zastosowanie robotów z tej serii jest bardzo szerokie. Mogą być one wykorzystywane niemal w każdej branży. Ogromną zaletą robota jest jego precyzja – 100% bezbłędna praca według ściśle określonej procedury, co sprawia, że znalazł zastosowanie również w laboratoriach chemicznych i firmach farmaceutycznych. Do jego zadań należą m. in. precyzyjne lokalizowanie, przenoszenie i umieszczanie badanych próbek, obsługa wszelkiego rodzaju próbek (stałe, płynne, gazowe), odczyt kodów i opisów z próbek, archiwizacja i porównanie z wzorcem, integracja i sterowanie sprzętem laboratoryjnym.
Robot HCR-5 został wykorzystany także do zrobotyzowania obsługi prasy krawędziowej TRUMPF w firmie z województwa mazowieckiego. Dla pracowników oznaczało to łatwy i szybki załadunek wyciętych elementów do podajnika, natomiast resztą zajmował się robot. W tym przypadku nie miało znaczenia to, że co kilka godzin elementy się zmieniały. Programowanie oparto na zasadzie parametryzacji cech wspólnych.
Oprogramowanie RODI z graficznym interfejsem użytkownika, poprzez odpowiednie rozmieszczenie poszczególnych ikon, ułatwia obsługę robota HCR.
Obecnie na WMT jest programowany i wykorzystywany do zadań związanych z cieczami i materiałami sypkimi. Przemysłowe aplikacje takich robotów znajdują zastosowanie w motoryzacji, logistyce, spawalnictwie, specjalistycznych pracowniach laboratoryjnych oraz wykonywaniu precyzyjnych zadań przy współpracy z człowiekiem.


Rys.3. Robot współpracujący HCR-5
Największym robotem jest bardzo nowoczesny TruLaser Robot 5020 firmy TRUMPF. Jest on przeznaczony do opracowywania i testowania nowych technologii spawania, cięcia, napawania (proszkowego i drutem pełnym) oraz obróbki cieplnej z wykorzystaniem wiązki lasera. Urządzenie zostało wyposażone w trzy niezależne rodzaje głowic: do spawania, cięcia i napawania, dwuosiowy pozycjoner oraz stół obrotowy. Posiada również oprogramowanie do projektowania procesów spawalniczych, określenia rzeczywistego położenia spawanych krawędzi i korekty toru ruchu robota. Źródłem zasilania jest laser, pompowany diodowo.
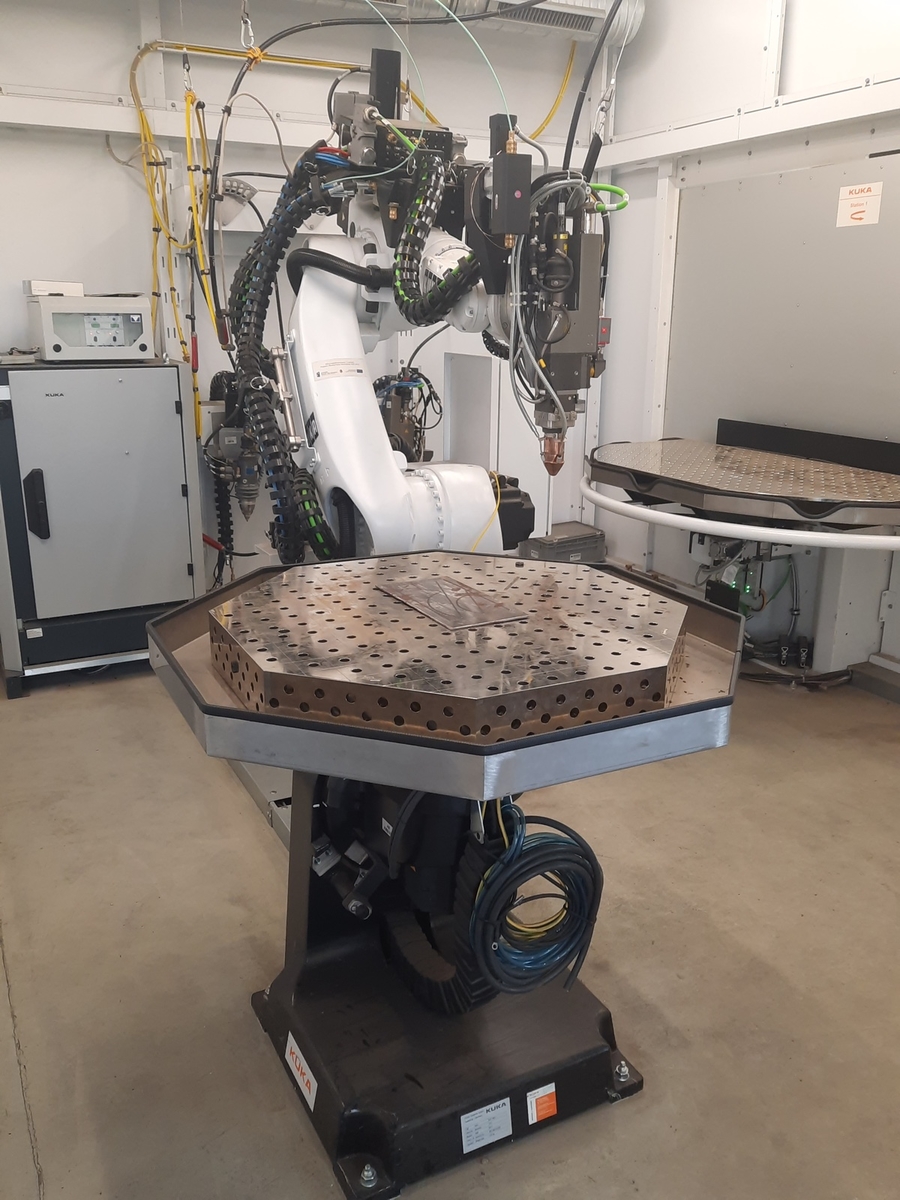

Rys. 4. Robot TRU LASER ROBOT 5020
Koło Naukowe Informatyki Przemysłowej zainspirowane robotyzacją wykonało prototypowe ramię robota przemysłowego HUMERO. Projekt został zrealizowany przez dwóch studentów: Łukasza Kapałę i Aleksandra Janeczko. Całość prac projektowych i konstrukcyjnych wykonano z wykorzystaniem dostępnych na WMT urządzeń i oprogramowania. Do wykonania obudowy, korpusu i ramion zastosowano proces drukowania przestrzennego 3D. Ramię robota posiada sześć ruchomych osi z możliwością niezależnego ich kontrolowania przez sprzężenie układu sterowania z funkcjonalnym interfejsem użytkownika. Głównym urządzeniem napędzającym robota są serwomechanizmy, czyli zamknięte układy sterowania zawierające małe silniki elektryczne połączone z przekładnią zębatą. Z poziomu rozbudowanego panelu sterowania oraz wykorzystania m.in. platformy minikomputera Raspberry Pi oraz modułu Arduino, operator może programować określone polecenia, które są następnie wykonywane przez ramię HUMERO.
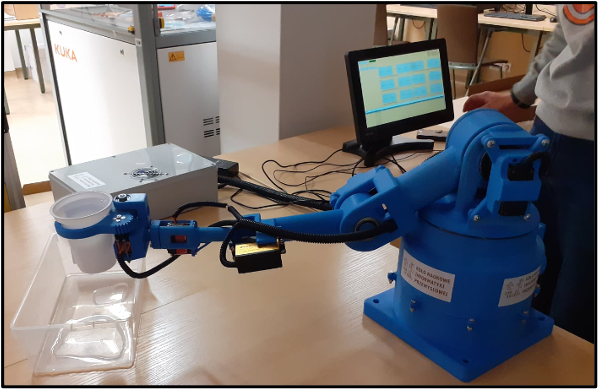
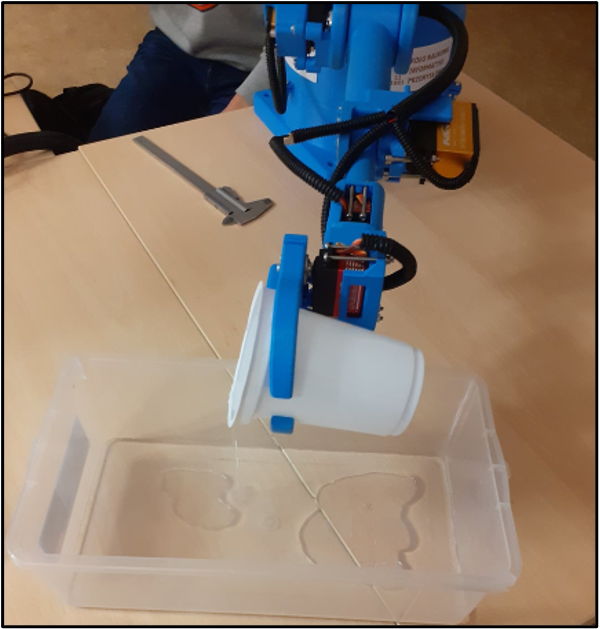
Rys. 5. Ramię HUMERO zbudowane przez studentów WMT
Wyposażenie Wydziału Mechaniczno-Technologicznego w roboty przemysłowe pozwala na zdobycie przez studentów umiejętności praktycznych związanych z robotyzacją i automatyzacją procesów wytwarzania. Ma to istotny wpływ na ich dalszą karierę zawodową po ukończeniu studiów. W związku z dynamicznie rozwijającym się Przemysłem 4.0, nabyta wiedza i doświadczenie zawodowe pozwoli absolwentom WMT na znalezienie atrakcyjnego zatrudnienia na stanowiskach technologów czy też programistów robotów przemysłowych. Zainteresowanie robotyzacją jest coraz większe wśród młodzieży szkół średnich, co szczególnie widoczne jest podczas finału ogólnopolskiego konkursu „Od pomysłu do przemysłu” (https://knip.prz.edu.pl/konkurs-od-pomyslu-do-przemyslu), konkurs jest corocznie organizowany przez WMT oraz Zakład Elektroniki i Automatyki CHIP.



